|
|

|

|
| e-Pub |
Section: New Results
Collaborative Virtual Environments
Acting in Collaborative Virtual Environments
VR Rehearsals for Acting with Visual Effects
Participants: Rozenn Bouville, Valérie Gouranton and Bruno Arnaldi,
We studied the use of Virtual Reality for movie actors rehearsals of VFX-enhanced scenes. The impediment behind VFX scenes is that actors must be filmed in front of monochromatic green or blue screens with hardly any cue to the digital scenery that is supposed to surround them. The problem is worsens when the scene includes interaction with digital partners. The actors must pretend they are sharing the set with imaginary creatures when they are, in fact, on their own on an empty set. To support actors in this complicated task, we introduced the use of VR for acting rehearsals not only to immerse actors in the digital scenery but to provide them with advanced features for rehearsing their play. Indeed, our approach combines a fully interactive environment with a dynamic scenario feature to allow actors to become familiar with the virtual elements while rehearsing dialogue and action at their own speed. The interactive and creative rehearsals enabled by the system can be either single-user or multiuser. Moreover, thanks to the wide range of supported platforms, VR rehearsals can take place either onset or offset. We conducted a preliminary study to assess whether VR training can replace classical training (see Figure 12). The results show that VR-trained actors deliver a performance just as good as ordinarily trained actors. Moreover, all the subjects in our experiment preferred VR training to classic training [17].
|

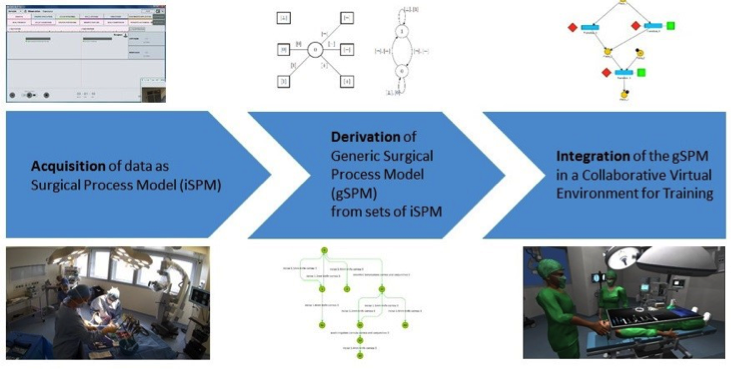
Synthesis and Simulation of Collaborative Surgical Process Models
Participants: Guillaume Claude, Valérie Gouranton and Bruno Arnaldi
The use of Virtual Reality for surgical training has been mostly focused on technical surgical skills. We proposed a novel approach by focusing on the procedural aspects [4]. Our system relies on a specific work-flow, which enbables to generate a model of the procedure based on real case surgery observations made in the operating room (see Figure 13). In addition, in the context of the project S3PM we then proposed an innovative workflow to integrate the generic model of the procedure (generated from the real-case surgery observation) as a scenario model in the VR training system (see Figure 14). We described how the generic procedure model could be generated, as well as its integration in the virtual environment [18].
|
|

This work was done in collaboration with HYCOMES team and LTSI Inserm Medicis.
Awareness for Collaboration in Virtual Environments
Take-Over Control Paradigms in Collaborative Virtual Environments for Training
Participants: Gwendal Le Moulec, Ferran Argelaguet, Anatole Lécuyer and Valérie Gouranton
We studied the notion of Take-Over Control in Collaborative Virtual Environments for Training (CVET). The Take-Over Control represents the transfer (the take over) of the interaction control of an object between two or more users. This paradigm is particularly useful for training scenarios, in which the interaction control could be continuously exchanged between the trainee and the trainer, e.g. the latter guiding and correcting the trainee’s actions. We proposed a formalization of the Take-Over Control followed by an illustration focusing in a use-case of collaborative maritime navigation. In the presented use-case, the trainee has to avoid an under-water obstacle with the help of a trainer who has additional information about the obstacle. The use-case allows to highlight the different elements a Take-Over Control situation should enforce, such as user’s awareness. Different Take-Over Control techniques were provided and evaluated focusing on the transfer exchange mechanism and the visual feedback (see Figure 15). The results show that participants preferred the Take-Over Control technique which maximized the user awareness [24].
|

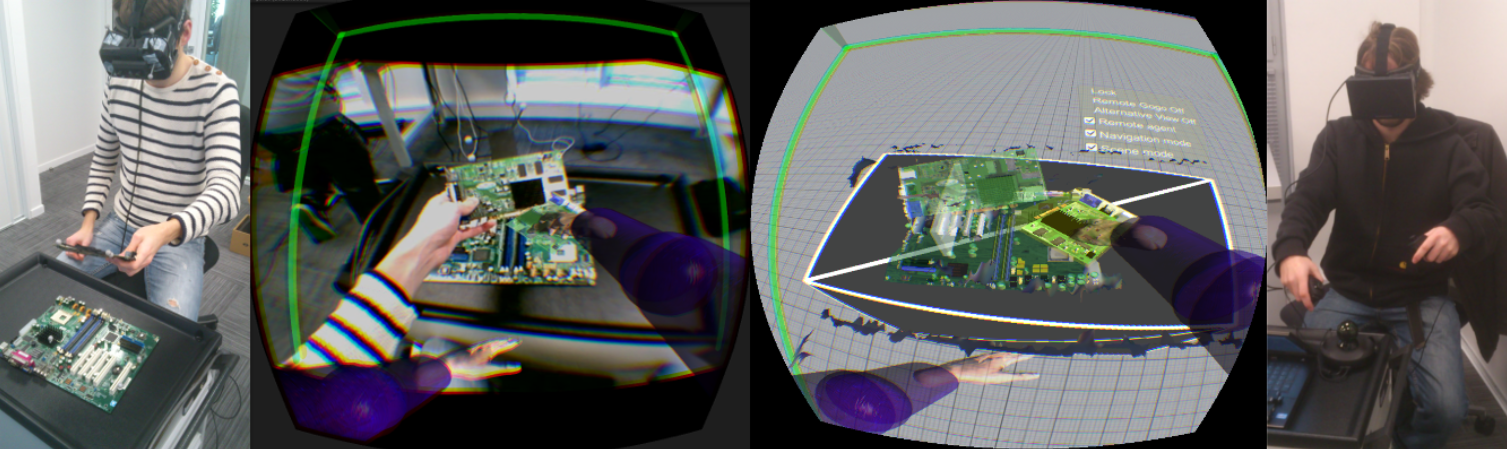
Vishnu: Virtual Immersive Support for HelpiNg Users: An Interaction Paradigm for Collaborative Remote Guiding in Mixed Reality
Participants: Morgan Le Chénéchal, Valérie Gouranton and Bruno Arnaldi
Increasing networking performances as well as the emergence of Mixed Reality (MR) technologies make possible providing advanced interfaces to improve remote collaboration. We presented a novel interaction paradigm called Vishnu that aims to ease collaborative remote guiding. We focus on collaborative remote maintenance as an illustrative use case. It relies on an expert immersed in Virtual Reality (VR) in the remote workspace of a local agent helped through an Augmented Reality (AR) interface. The main idea of the Vishnu paradigm is to provide the local agent with two additional virtual arms controlled by the remote expert who can use them as interactive guidance tools. Many challenges come with this: collocation, inverse kinematics (IK), the perception of the remote collaborator and gestures coordination. Vishnu aims to enhance the maintenance procedure thanks to a remote expert who can show to the local agent the exact gestures and actions to perform (see Figure 16). Our pilot user study shows that it may decrease the cognitive load compared to a usual approach based on the mapping of 2D and de-localized informations, and it could be used by agents in order to perform specific procedures without needing to have an available local expert [22].
This work was done in collaboration with b<>com and Telecom Bretagne.
|
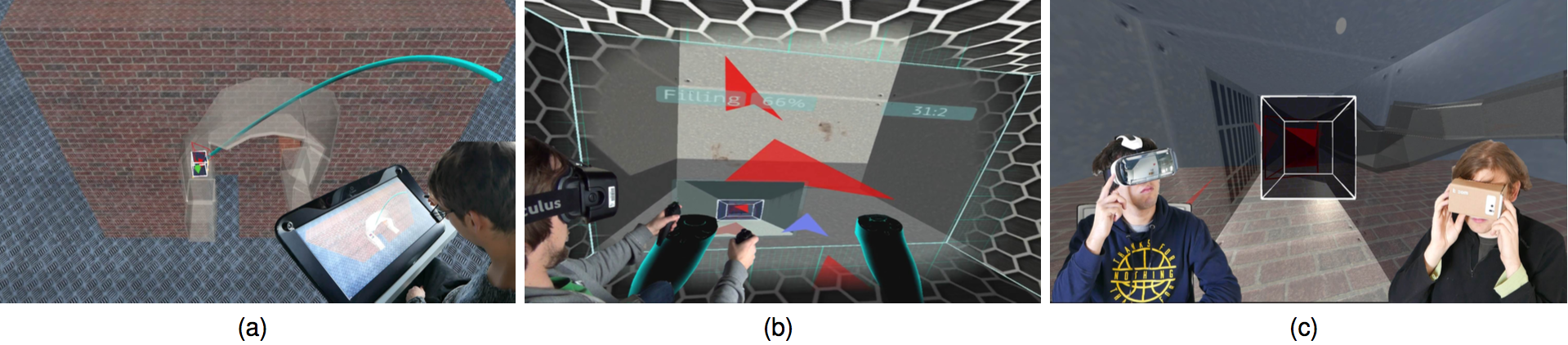
When the Giant meets the Ant: An Asymmetric Approach for Collaborative and Concurrent Object Manipulation in a Multi-Scale Environment
Participants: Morgan Le Chénéchal, Jérémy Lacoche, Valérie Gouranton and Bruno Arnaldi
We proposed a novel approach to enable two or more users to manipulate an object collaboratively. Our goal is to benefits from the wide variety of todays VR devices. Our solution is based on an asymmetric collaboration pattern at different scales in which users benefit from suited points of views and interaction techniques according to their device setups. Each user application is adapted thanks to plasticity mechanisms. Our system provides an efficient way to co-manipulate an object within irregular and narrow courses, taking advantages of asymmetric roles in synchronous collaboration (see Figure 17). Moreover, it aims to provide a way to maximize the filling of the courses while the object moves on its path [23],[35].
This work was done in collaboration with b<>com and Telecom Bretagne.
|